
近日,北京理工大学郭晓岗副教授团队受生物组织中的肌肉纤维和神经元启发,提出了一种具有本体感知功能的电热驱动作动器。通过监测电热驱动过程中的驱动层电阻变化,结合构型反演算法,完成了结构构型的动态反演,实现了作动器的驱动-感知一体。研究成果以Somatosensory Electro-Thermal Actuator through the Laser-Induced Graphene Technology为题发表于国际TOP期刊Small。
肌肉组织中的肌肉纤维和神经元能够实现动作和感知。在肌肉运动过程中,神经元能够识别肌肉张力和压力的变化,感受关节伸展程度,使生物体准确的判断肌肉的动作。使用激光诱导石墨烯(LIG)作为电热驱动材料和压阻功能材料,基于肌肉组织功能仿生设计开发具有本体感知功能人工软体驱动器,将为智能仿生软体机器人的发展提供助力。

图1. 仿生自感知LIG驱动器设计示意图
研究团队在前期柔性传感器与驱动器的研究基础上,通过优化LIG驱动器的结构与制备参数,开发了具有本体感知功能的LIG电热驱动器。通过驱动器单元的组合,可以实现1D-2D,2D-3D及3D-3D等不同维度结构的重构;利用LIG的压阻特性,通过监测构形重构过程中的功能层电阻变化,结合构型反演算法,实现了结构构形的连续动态监测与反演。

图2. 基于自感知LIG单元组成的具有不同维度变形模式的驱动器结构
通过仿生结构设计与力学优化,开发了包括对百合、捕蝇草、黄海棠和藤蔓的仿生柔性驱动结构,并实现了各类结构构型的重构与反演,验证了本研究方法的有效性。
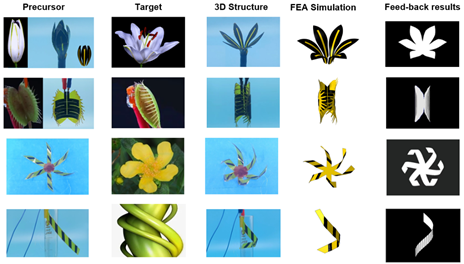
图3. 仿生自百合、捕蝇草、黄海棠和藤蔓的自感知LIG驱动器
具有本体感知功能的柔性驱动器件,能够在能见度低的环境中,通过驱动自感知特性为操作者提供辅助,实时监测其工作状态,在相当程度上摆脱了对光学相机类设备的依赖。此外基于电信号采集的自感知器件,在某些低电源负载、低数据带宽条件下的应用也具有显著的优势。文中展示了基于自感知LIG驱动器开发的电磁屏蔽斗篷、柔性夹爪等器件,通过对其不同变形状态下的构型重构,可以按需控制斗篷的开合或感知抓取物体的尺寸。
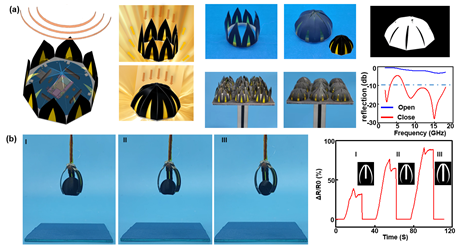
图4. LIG自感知驱动器的应用。a)可开合电磁屏蔽斗篷;b)抓取不同尺寸的物体
北京理工大学郭晓岗副教授为论文通讯作者,团队博士研究生王昊为论文第一作者。团队博士研究生李旭阳、王晓悦、秦永、潘洋为论文共同作者。该研究工作得到了科技部重点研发计划的资助。
北京理工大学郭晓岗副教授团队,长期从事(1)智能结构的力学设计与驱动方法,(2)基于柔性传感的结构位移重构与构形反演方法,(3)柔性机器人设计与应用研究。在柔性传感研究方向,团队发展了金属基、碳基应变传感体系,提出了基于力学理论模型、神经网络的任意三维构形高精度快速反演方法,研究成果发表于npj Flexible Electronics、Small、ACS AMI、IJSNM等学术期刊,部分成果已经完成了工程应用。
论文链接: